Electronics and Robotics Projects
Pancake Cafe
In this interdisciplinary robotics capstone, I helped build the Pokémon Pancake Cafe, a fully automated system where robots take, prepare, and deliver pancake orders. I led the development of the order form website and managed Airtable integration to streamline communication between the customer-facing interface and the technical teams handling cooking and delivery. By ensuring real-time data flow across subsystems, I enabled the café’s autonomous operation from user input to final service. This project challenged me to think holistically about system coordination, user experience, and backend infrastructure in a live robotics environment.
Object Recognition-Based Maze Navigation
For this project, we designed a navigation system that allowed our Create 3 robot to autonomously move through a maze using only object recognition. We trained a custom computer vision model to identify six different Poké Balls, each signaling whether the robot should turn left or right. The robot needed to detect each object at roughly 6 inches away and execute precise 90-degree turns, with turn directions revealed just 10 minutes before the demo. We built the system from scratch using Python, OpenCV, and TensorFlow, integrating IR sensors for distance detection and ROS2 to control robot movement. As a final touch, the robot performed a fun celebratory action after identifying the last Poké Ball. This project challenged us to combine real-time image classification with reliable hardware actuation under tight time and design constraints.
API Controlled Roomba Obstacle Course
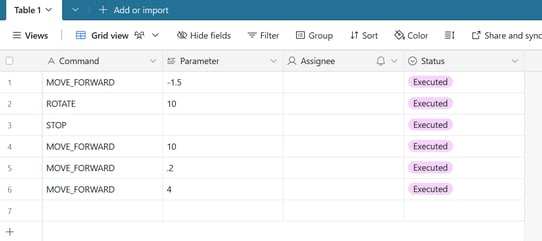
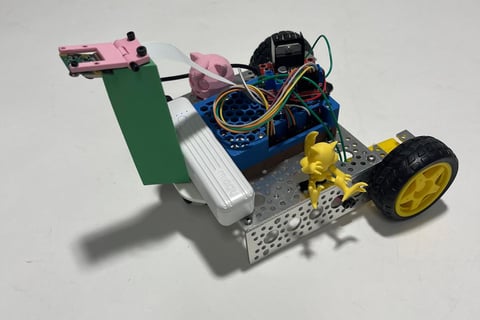
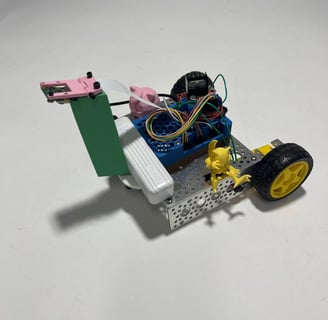
In this project, I designed a remote-control system to navigate a prebuilt Create 3 Roomba through an obstacle course. I programmed the robot using Python and ROS2, utilizing Airtable for sending control commands and a phone camera for real-time visual feedback. The system was developed from scratch, including a custom Airtable interface for controlling the robot’s movements. The project required manual obstacle avoidance using the live camera feed, showcasing my skills in real-time control, ROS2 programming, and creative problem-solving within constraints.
Colored Line Follower - Using Computer Vision
We developed a car equipped with a Raspberry Pi camera, leveraging the capabilities of the OpenCV Python library. By programming the car to interpret lines of various colors, we achieved autonomous navigation. The car can recognize and follow these colored lines accurately, allowing it to maneuver along a designated path without human intervention. The combination of the Raspberry Pi camera and OpenCV enables real-time processing and decision-making. We then implemented a PID feedback loop so that the car would stay on track. Through this project, we learned about the complexities of image processing, and automated control systems.
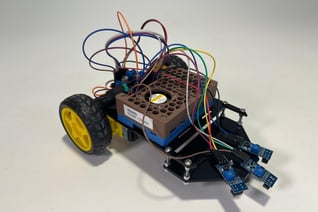
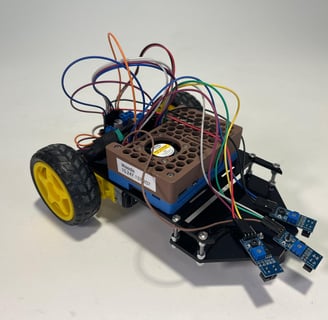
IR Sensor Line Following Car
We have developed a robot equipped with an infrared (IR) sensor designed to autonomously follow a path marked by black tape. The robot operates by continuously sensing the tape and adjusting its movements in real-time. Utilizing a feedback loop with proportional control, the robot makes precise driving and turning decisions based on the position of the tape. This system allows for smooth navigation along the path, enabling the robot to maintain its course even when encountering slight deviations. The combination of IR sensing technology and proportional feedback ensures that our robot can effectively complete tasks that require adherence to specific routes.
Color Sorting Robot
We designed an innovative robot equipped with a TCS3200 color sensor and stepper motors to efficiently sort an unsorted collection of balls by color. The color sensor works by measuring the intensity of red, green, and blue (RGB) light frequencies reflected from the objects. To ensure accuracy, we refined the system through a calibration process involving white and black reference objects, allowing us to average and normalize the measurements. Once the sensor identifies the color, the processed values are compared to predefined color profiles to find the best match. The integration with stepper motors enables precise sorting, as the motors can rotate a specified number of steps to direct the balls into their respective color groups. This system showcases the effective combination of sensors and mechanical components.




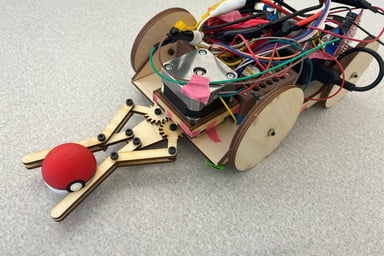
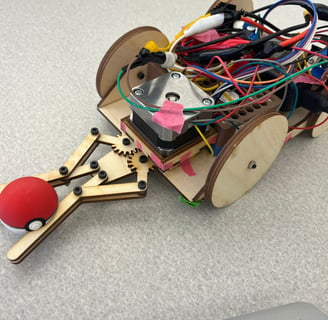
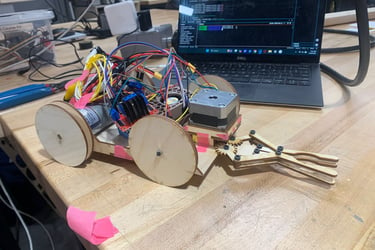
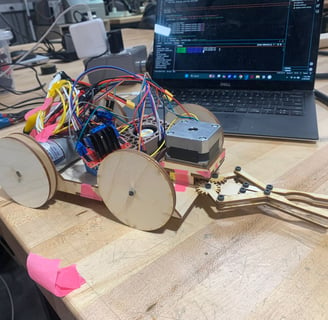
Robotic Arm Gripper
We developed an innovative robotic gripper designed specifically for picking up and moving objects efficiently. Utilizing Onshape for our design process, we engineered a system where a stepper motor is pivotal to its functionality. The motor spins a spur gear, which in turn operates the linkage arms of the gripper. This mechanism allows the arms to open and close seamlessly, enabling secure handling of various objects. The gripper is on the front of a car which allows the object to be moved around.
Tools used: Python, CAD, laser cutter, Raspberry Pi, gears, linkages
Raspberry Pi-Driven Ramp-Climbing Vehicle with Flask-Based Control
We first fabricated a car using Solidworks, and a laser cutter. Then we used Python on the Raspberry Pi, to control the car via the internet. We ran a Flask server that allows us to control the car via keyboard inputs (WASD). The car uses an H-bridge PCB that allows the car to go forward and backwards, and the two motor system allows the car to turn left and right easily. The car is able to autonomously go up a ramp with just a singular click of a button.




Motorized Game: Shot Stopping Goalie!
I designed a game that incorporates a motor, a microcontroller with programmed code, and a circuit board. This game utilizes Python programming to control the spinning of the motor and aims to prevent someone from scoring. The game uses a joystick to allow the keeper to spin one direction vs another adding difficulty for the opposing player. The objective of the game is to roll the ball past the keeper at the right moment. This interactive game combines technology and skill, providing an engaging and challenging experience for the players. With the integration of the motor, microcontroller, and circuit board, the game allows for precise timing and strategic thinking. It is a unique and innovative way to test one's reflexes and decision-making abilities.








Tools used: Python, KB2040, Hbridge, handsaw for the goal, 3d printing, circuit board
Printed Circuit Boards
Using KICAD, I successfully designed two printed circuit board (PCB). One with the capability to receive a 12V input and utilize voltage regulators and capacitors to provide a stable 3.3V output for the microcontroller, and another that functions as an Hbridge, allowing a motor to be spun in two different directions based on input. The PCB layout was meticulously crafted to ensure efficient power management and accurate voltage regulation. By carefully selecting the appropriate components and designing the circuit for optimal performance, I created a reliable power supply system for the microcontroller. This PCB design will greatly enhance the functionality and performance of the microcontroller, allowing it to operate seamlessly within the desired voltage range.







